Modifying Servos For a Moving Platform
Using base motion inputs, RCP8 can carry out electronic stabilization of an antenna that is mounted on a moving platform.
For moving platforms, you must modify the position and velocity servos so the antenna motion is referenced to the inertial (Earth) frame of reference. The positions and the velocities are requested by the user and reported back to the user, relative to the local horizon and local north, just as they would for a stationary pedestal. RCP8 manages the coordinate transformations needed to convert between the Earth system of units and the pedestal system of units.
To stabilize an antenna on a moving pedestal, RCP requires the instantaneous roll, pitch, and heading of the pedestal base as well as the time derivatives of those three quantities. Pedestal orientation is used to convert between the two coordinate systems. RCP also requires the rate of change of pedestal orientation.
The following list shows the components that contribute to the net Earth velocity of a scanning antenna:
- The component results from rotation of the pedestal azimuth and elevation axes.
- The component is the result of projected motion of the entire pedestal assembly.
- The component is computable from the rate of change in the base orientation angles.
You can modify the basic velocity servo (see Fail-safe antenna), to work in Earth coordinates by adding a coordinate conversion module. The modified servo is shown in the following figure.
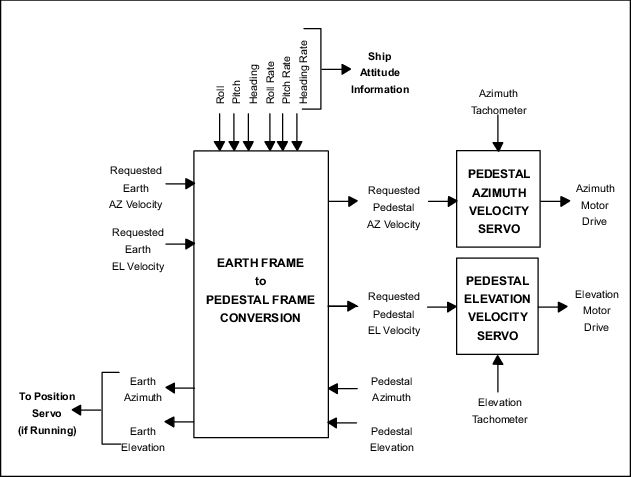
Rather than accepting requests for particular pedestal speeds, the new servo responds to commands to move at real Earth-relative velocities. The conversion module receives pedestal attitude information from an inertial navigation unit (INU) mounted on or near the pedestal. Based on these data, and on the current pedestal azimuth and elevation, Earth velocity requests are converted to equivalent pedestal velocity requests. These are fed to the 2 old-style velocity servos that use tachometer feedback to compute appropriate motor drives.
The velocity conversion module uses the pedestal azimuth and the elevation angles as input to project the Earth velocity into the pedestal frame. The Earth azimuth and the elevation angles are also computed.
When a position servo runs on one or both axes, these computed Earth angles are used by the position servo in the same way that pedestal angles are used in the land-based case. The position servo (see Position Servo Theory) is unchanged with the exception of the Earth angles, which are substituted where a pedestal angle previously appeared.
The angles can also be wired to a nearby signal processor and simultaneously sampled with data from the radar.
A complimentary addition to RCP8 moving platform servos is its ability to scan co-planes. By introducing an artificial bias to the pedestal attitude information, a 0° elevation scan can be transformed into a planar scan in any orientation, not simply along the horizontal plane. This technique works on land and sea.
The INU data stream may include status bits that convey the validity of the attitude angles. RCP8 coasts for up to 1 second when it receives an invalid INU Roll/Pitch/Heading bit, or until the invalid bit is cleared, whichever occurs first.
The last valid report of INU parameters are used for stabilization during this time (including computation of the earth-relative output angles). Since it is unlikely that the antenna azimuth and/or the ship attitude move more than 30° in 1 second, IRIS message DSP AZ angles exceed 30 degrees is not triggered by very short bursts of invalid INU data.
The option of continuing to use the new INU parameters for the one second interval (rather than coasting with the last valid ones) was rejected for safety reasons. There is a possibility that the new angles are bad.