Position Servo Theory
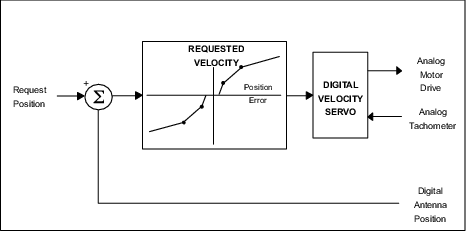
The position servo is implemented as a simple extension, as shown in the following figure.
To reach a given position:
- The position error is used to calculate the velocity that is necessary to correct it.
- The velocity is fed into the velocity servo, which continues to operate as described in the previous sections.
The elevation position servo works over the complete 360° interval from -90 ... +270°.
Servo motion is always directed over the top when the antenna moves from one position to another. For example if the antenna is at +200°, and a request is made to move to -30°, then the antenna traverses the 230° sector passing through 90°. This is different from the azimuth axis, where the shorter 130° path would be taken.