
RVP10 weather signal processing
Radar signal processor (RVP) software triggers radar measurement by producing the trigger signal for the transmitter using the intermediate frequency digital receiver (IFDR) unit in the receiver.
After the IFDR unit has digitized the received echo signal into samples (I and Q data), the RVP processes the data in the radar server computer using computations such as:
- Converting the received signal amplitude into calibrated radar reflectivity values
- Doppler processing to filter out ground clutter and compute radial velocities
- Polarimetric processing to classify the measured hydrometeors and to apply attenuation correction.
The end product of the RVP process is a radar ray, where selected radar data from a certain short time interval is stored as a function of range.
The following figure shows a block diagram of moment processing.
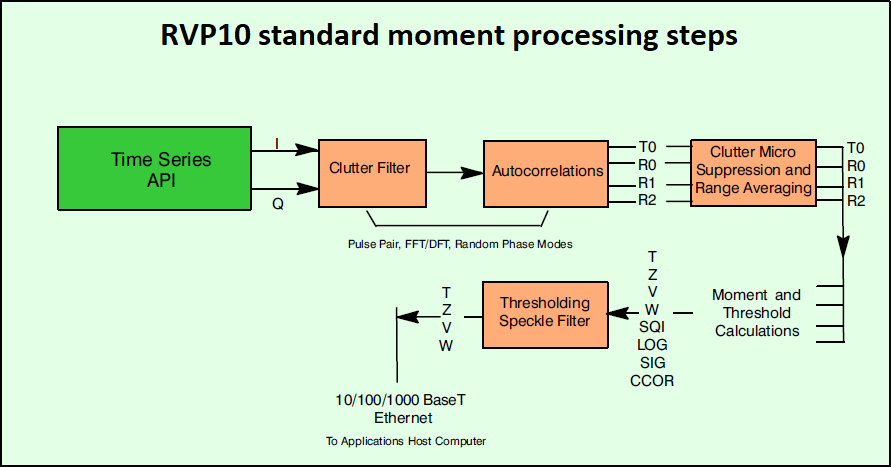
Using the R2 lag improves the
estimation of signal-to-noise ratio and spectrum width. Processors that do not use
R2 cannot effectively measure the SNR and spectrum width.
Parameters configure signal processing, such as pulse repetition frequency, range resolution, and Doppler filter parameters. You can select these either directly when running RVP as a standalone or through the IRIS software when IRIS controls the RVP process during automatic weather radar measurements.
Applications
The resulting intensity, radial velocity, spectrum width, and polarization measurements are sent to a separate host computer to serve as input for applications such as:
- Quantitative rainfall measurement
- Vertical wind profiling
- Zdr hail detection
- Tornado and microburst detection
- Gust front detection
- Particle identification
- Target detection and tracking
- General weather monitoring
Processing Modes
RVP10 has several major processing modes options for obtaining basic moments:
- Pulse pair mode time domain processing
- DFT/FFT mode frequency domain processing
- Random phase mode for second trip echo filtering
- Polarization mode processing
RVP10 performs discrete Fourier transforms (DFT) and fast Fourier transforms (FFT). FFT is more computationally efficient than DFT, but the sample size is limited to a power of two (16, 32, 64, and so on.) This is too restrictive on the scan strategy for a modern Doppler radar since this means, for example, that a 1° azimuth radial must be constructed from exactly 64 input I/Q values. RVP10 has such processing power that when the sample size is not a power of two, a DFT is performed instead of an FFT.