
Target Detection: Migratory Bird Examples
The following examples are for bird tracking during a fall migration. Targets are primarily flocks of large storks comprised of 30 or more individuals traveling from Northeast to Southwest (heading range of 200 to 250) at about 12 m/s (39 ft 4 in / s) (speed range of 8 to 16 m/s (26 ft 3 in to 52 ft 6 in / s)).
These figures show products and displays produced by the Target algorithm.
Input PPI's of Radial Velocity
The input data were based on a volume scan of four elevation angles at 0.5, 1.0, 2.0, and 3.0° elevation angle. The input resolution is 125 m (410 ft 1 in).
PPI products of
radial velocity to 45 km (28.0 mi) range for all angles are used, that is, a product named
V_XXX_045 is generated with the wild card * in the elevation selection. A
product pixel resolution of 720 x 720 is used to match the 125-m (410 ft 1 in) input data
resolution.
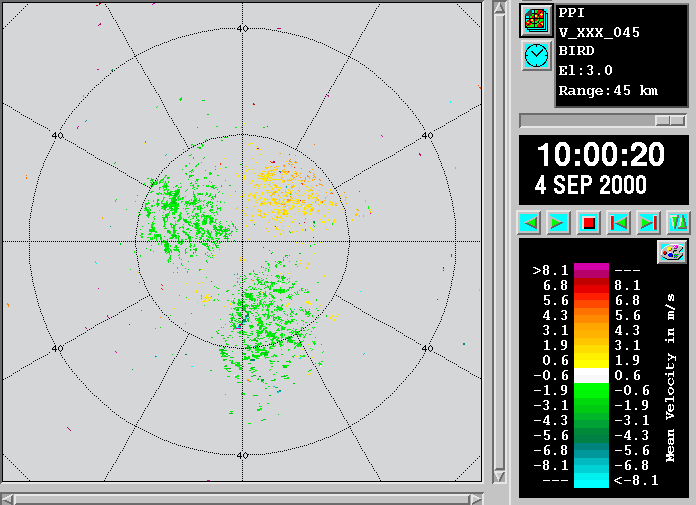
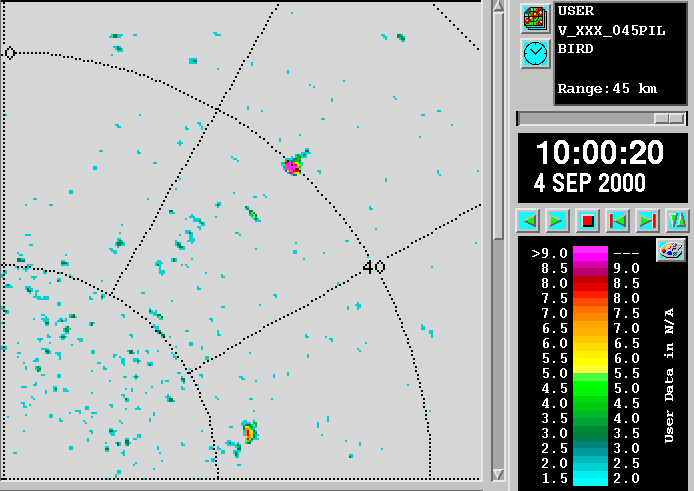
The following figure shows an example of a 3° elevation PPI. There is a clear air echo only and winds are generally weak. At 15 km (9.3 mi) South of the radar there is a velocity anomaly that can be later identified as a bird flock. There are also other airborne targets, but since they may only be 1 or 2 pixels, it is difficult to separate these from the background noise and clear air echo.
Background Field
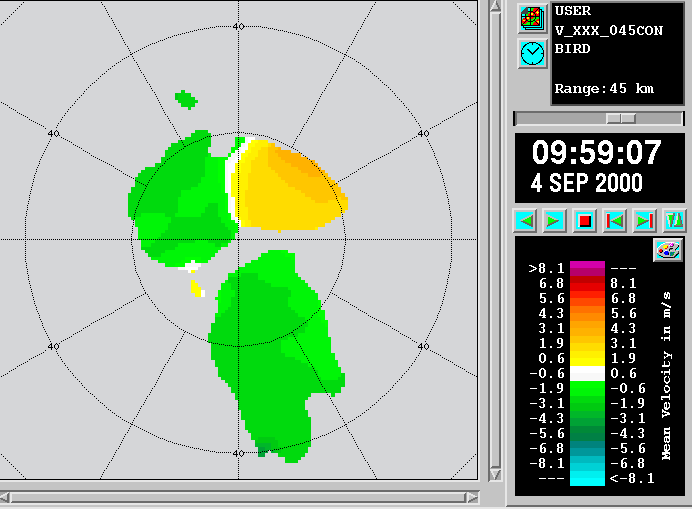
The contrast field is a smoothed version of the DWELL data which is used as a dynamic threshold for the contrast filter. For this example a minimum coverage criterion of 25 % was used. The DWELL is 10 minutes. Note that aggressive clutter filtering has removed nearly all of the clear air echo at 0 velocity.
Note that only the large scale echoes are included in the background field. This is important, otherwise airborne targets would be removed during the contrast step when this background velocity is subtracted.
Data Dwell Product
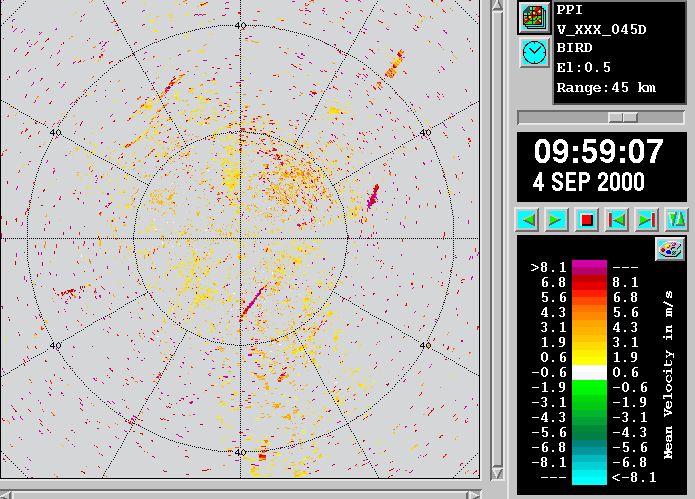
The data DWELL product (data was selected as the primary output) is a PPI product combining all of the PPI products from all elevation angles for the prior 10 minutes (22 PPIs in this case). Only positive values are included since the output is the absolute value of the velocity anomaly as compared to the background field. A contrast threshold of 1 m/s (3 ft 3 in / s) was used, that is, only data points that differ from the background field by more than 1 m/s (3 ft 3 in / s) are included in the DWELL PPI product.
This shows streaks of velocity anomaly which are likely bird targets. Note that all of the speckles in all of the PPI products are unfortunately passed through the DWELL algorithm. Also note that most of the clear air echo has been effectively removed by the contrast filter.
Time Dwell Product
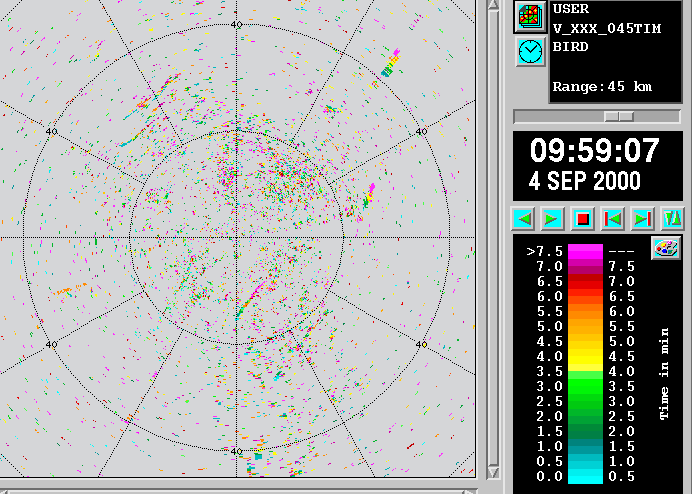
The time DWELL product shows the age of the points in minutes. The most recent points are represented in blue and the older points in red. This clearly shows the streaks of motion from northeast to southwest. This is even more apparent in animation since the streaks move across the screen to the Southwest.
The random noise shows a chaotic speckled pattern in time. There is a streak of interference echo which shows only a single color (to the southwest at 30 km (18.6 mi)).
Pile Product (2X Zoom example)
This shows the result of correlation step in which the time DWELL points are "piled". Since each trial wind produces a different pile product, the diagnostic output only shows the pile product for the first trial wind. In this case the result for the particular trial wind of 210° and 12 m/s (39 ft 4 in) was selected by inputting only these values into the limits for the speed and direction ranges.
The results show that the coherent streaks of echo as seen in the DWELL time display are effectively "piled-up" by this trial wind, while background noise produces only weak values. Not all streaks produce a large value since the targets may be moving at a different velocity. This is why it is important to use a spectrum of trial winds.
WARN Product
The final result is a warning product based on a composite of all warnings for all trial winds. This example used a threshold of 8 for the correlation threshold (pile product value). The icon here is drawn to make a clear indication of the type of warning.
Alternatively, the warning display can be configured via the output options button to display the numerical value of the height in Kfeet of the bird flock beside the icon, or to display the speed in knots of the flock. The height information is only available for track detection based on PPI input products since there is no height information available from the other input products that can be used for DWELL (for example, VIL and TOPS).
When this is animated, the birds appear to fly across the screen at their proper velocity. Some icons may drop in or out if they are small flocks on the edge of detection. Occasional false alarms show as isolated flashes during animation. The primary tuning parameter to balance the probability of detection and false alarm rate is the Correlation Threshold (pile height).
Dwell WARN Product
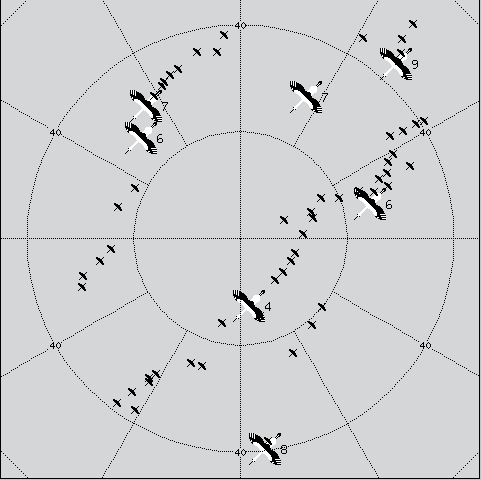
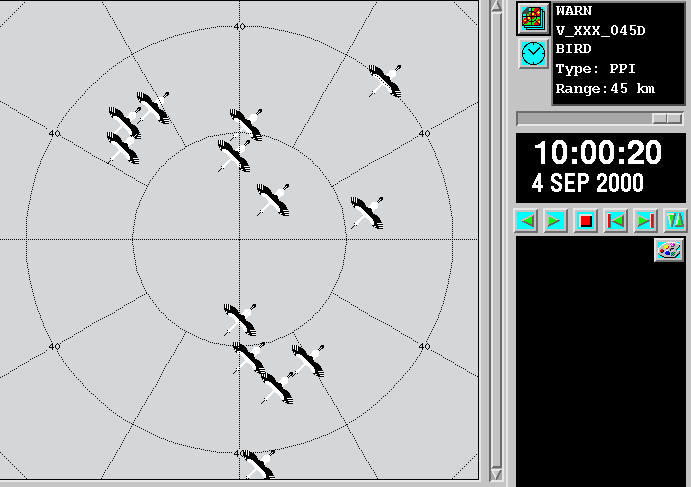
The example shows the results of the DWELL algorithm run on WARN products generated by the bird warning feature. This display is recommended for use by air traffic controllers who must advise pilots of possible bird activity. In the example above, the individual bird warnings are dwelled for 45 minutes. The display shows the selected icon (in this case a large bird) at the position of the most recent warning in the dwell sequence. Prior warnings are shown using a different icon which is also rotated to the direction of motion. The prior warning icon name is made by appending "d" (short for dwelled) to the primary icon. In this case we get birdd.xbm.
The result is a track style display that shows the bird activity over the dwell time. Inactive tracks do not have the large bird icon at the end. Tracks can become inactive if the birds fly into an obscured region or if the flock is small near the threshold of detection or if the birds stop to roost or perhaps "funnel" in a local thermal to gain altitude. However, even inactive tracks show controllers that there is confirmed bird activity in the area near the last sighting.