
DWELL Target Detection Algorithm
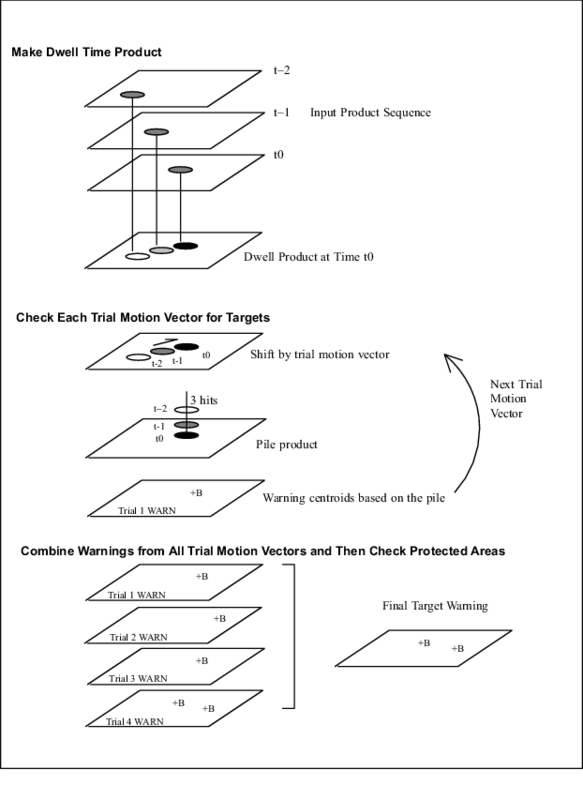
The target detection algorithm uses a series of motion vectors, spanning the possible range of target speed and direction, to shift a time DWELL product.
Targets whose motion matches the assumed motion vector "pile". The depth of the pile provides a measure of the "coherent motion" of the target. Essentially this is an autocorrelation approach. The steps are:
-
A time DWELL product is made in the usual manner.
Note that if the target warning is enabled, then even if a data DWELL product were requested, the time DWELL would be created for the warning.
-
The time DWELL points are shifted back in horizontal space according to a trial velocity vector.
Targets that are moving at a constant velocity are "piled" on top of each other. The output of this step is an intermediate "pile" product which has the number of data points that are accumulated (piled) on each pixel.
-
A warning/centroid algorithm runs using a selectable threshold for the number of "pile" points.
The approach is the same as in WARN: Warning/Centroid Product.
Note that the pile product units are 4X the actual number of points. For example, for a pile of 3 points, the representation would be 12 in the diagnostic pile product (
PIL). - The previous 2 steps are repeated for each trial.
-
After all trials have run, the centroid products for each trial are combined to eliminate "double hits" that occur for the same flock. That is, there may be several trial winds that produce centroids of sufficient intensity (pile number).
The combination combines all centroids that are within 3 km of each other by choosing the one with the largest pile number.
- The combined warning product is checked for protected areas that have been hit.
- The final output WARN product is named using the same name assigned to the DWELL product.
Target Detection Data Format
The target detection algorithm generates an IRIS WARN product.
Part of that warning_results structure are 3 data values. For normal
WARN products, these contain the average and maximum data values
within the detected centroid. When generated with the target detection algorithm, these
contain:
- The average and maximum height of the target returns (km).
- The average and maximum pile height.
- The average and maximum elevation angle of the target returns in degrees.