
BASE: Echo Base Product
BASE is used to determine the base of echoes.
Similar to the echo TOPS, the user specifies a dBZ Contour for the base. For each output pixel in the product, the algorithm searches downward through successive elevation angles. A base height is determined by linear interpolation when the specified dBZ Contour is crossed from greater to lesser value.
The final output of the product is a color-coded map of echo base heights for the selected dBZ contour. Optional Cartesian smoothing can be applied.
 |
C, S and X band radars detect precipitation particles such as rain or snow. They are not sensitive to cloud particles which are much smaller (of order a factor of 1000 smaller in diameter). The BASE product cannot be used to detect the cloud base height for radars transmitting in these bands. Millimeter wavelength radars (K and W bands) can detect cloud particles. |
|
Because of earth curvature, ground clutter and beam blockage, radars are poor at looking for features close to the surface. This means that the BASE product cannot detect echo bases to very low levels. When precipitation in excess of the specified dBZ contour is reaching the ground, or near to reaching the ground, the BASE product displays a special color to indicate that there is a BASE, but its height cannot be determined. |
- Select .
-
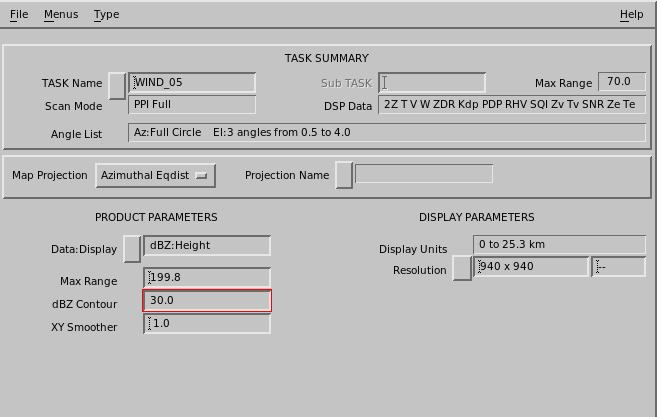
Configure the BASE product:
- Data:Display
- Choose from dBT Height, dBZ Height, or dBZc Height
- Max Range
-
Select the maximum range for the product. Recall that earth curvature effects are greater at greater ranges.
You can display a PPI at your lowest elevation angle and use the cursor tool to see what heights are possible to observe at various ranges.
For example, for a 0.5° elevation angle at 100 km (62.1 mi), the beam is centered at 2.3 km (1.4 mi). It is not possible to detect echo bases lower than this.
- dBZ Contour
- Select the dBZ threshold for the echo base.
-
Apply the AZ/EL Smoother.
Enter the values in degrees, first for the azimuth and then for the elevation direction.
Typical values are 1.0, 1.0.